Навигация
Электропривод фрикционного бездискового пресса
12757
знаков
1
таблица
7
изображений
Курсовой проект
по дисциплине "ТЭП"
«Электропривод фрикционного бездискового пресса»
Содержание
Введение
Анализ и описание системы «электропривод – рабочая машина»
Анализ и описание системы "электропривод – сеть" и "электропривод – оператор"
Выбор принципиальных решений
Расчет силового электропривода
Расчет статических механических и электромеханических характеристик двигателя и привода
Расчет переходных процессов в электроприводе за цикл работы
Проверка правильности расчета мощности и окончательный выбор двигателя
Заключение
Список использованных источников
Введение
Целью данного курсового проекта является разработка электропривода фрикционного бездискового пресса. В процессе проектирования планируется овладеть базовыми понятиями по дисциплине Теория электропривода. Требуется рассчитать и выбрать двигатель привода, рассчитать механические характеристики электропривода, рассчитать и построить переходные процессы основных режимов работы, проверить двигатель по нагреву и др.
1. Анализ и описание системы «электропривод – рабочая машина»
Механизм бездискового пресса приводится в действие от асинхронного короткозамкнутого электродвигателя. Средняя продолжительность включения пресса ПВ, сила давления пресса P, вес поступательно движущихся частей (ползуна, гайки) G, максимальный ход ползуна L, ход ползуна за один оборот маховика l, передаточное отношение от вала двигателя к шпинделю при холостом ходе i0, при рабочем ходе iР.
Движение ползуна вниз происходит с увеличенной скоростью, вверх – замедленно. Изменение статического момента на валу двигателя за цикл работы пресса и изменение скорости вращения маховика приведены на рисунке 1.1.
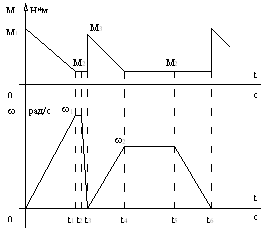
Рисунок 1.1 – Упрощенная тахограмма.
Дальнейшее уточнение тахограммы будет произведено при построении нагрузочных диаграмм.
Рабочий цикл состоит из:
(t0 – t1) – разгон маховика до скорости w1;
(t1 – t2) – двигатель отключен от маховика и нагружен только моментом холостого хода;
(t2 – t3) – брикетирование за счет энергии маховика, отдав всю энергию, маховик останавливается;
(t3 – t4) – разгон маховика в обратную сторону до скорости w2, ползун поднимается вверх;
(t4 – t5) – двигатель поддерживает скорость вращения маховика постоянной и равной w2;
(t5 – t6) – двигатель продолжает вращаться на холостом ходу, маховик затормаживается механическим тормозом и останавливается.
Составим расчетную схему механической части электропривода. Кинематическая схема привода изображена на рисунке 1.2.
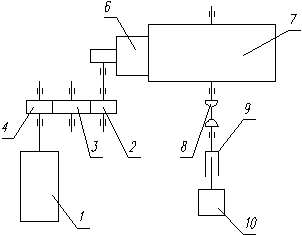
Рисунок 1.2 – Расчетная схема электропривода – для режима рабочего хода.
На рисунке 1.2 сделаны следующие обозначения:
1. – двигатель;
2. – зубчатое колесо рабочего хода;
3. – промежуточное зубчатое колесо;
4. – ведущее зубчатое колесо;
5. - зубчатое колесо холостого хода (не показано);
6. – фрикционный ролик;
7. – маховик;
8. – шпиндель;
9. – гайка трехходовая;
10. – ползун.
При кинематическом расчете воспользуемся следующими формулами
- для вращательного движения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
- для поступательного движения:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
Также при расчете необходимы формулы для определения передаточных чисел отдельных звеньев, и формулы для нахождения момента инерции цилиндров.
Передаточное отношение шестерни:
 ;
;
где Z1, Z2 – количество зубьев.
Момент инерции:
![]() ;
;
где g - плотность материала (для стали - g » 7.66*103 кг/м3);
l – длина;
D – диаметр вала.
В силу специфических особенностей прессов будем считать, что все элементы конструкции абсолютно жесткие, и поэтому делать расчет жесткостей, не имеет смысла.
Передаточное число для пары двигатель - ведущее зубчатое колесо (4):
![]() ;
;
Передаточное число для пары промежуточное зубчатое колесо (3) – ведущее зубчатое колесо:
 ;
;
Передаточное число для пары промежуточное зубчатое колесо (3) –зубчатое колесо рабочего хода:
 ;
;
Передаточное число для пары зубчатое колесо холостого хода – ведущее зубчатое колесо:
 ;
;
Передаточное число пары зубчатое колесо рабочего хода – фрикционный ролик:
Определим момент инерции маховика, исходя из размера запасенной кинетической энергии. Учтем также запас потенциальной энергии в поступательно движущихся частях пресса. Можно записать следующее уравнение баланса энергии:
 ;
;
где l – максимальный ход ползуна;
m – масса поступательно движущихся частей;
j – момент инерции маховика;
w - скорость вращения маховика;
F – сила давления пресса;
Отсюда определяем момент инерции маховика:
![]() кг*м2;
кг*м2;
Для нахождения приведенной массы поступательно движущихся частей, необходимо определить радиус приведения (для передачи типа ходовой винт - гайка):
![]() ;
;
где h – шаг ходового винта;
iпр – передаточное отношение.
Тогда:
 м;
м;
Результаты приведения моментов инерций элементов движущихся поступательно и вращательно, приведены в таблице 1.1.
Таблица 1.1 - Расчет кинематического объекта
| 1 | 4 | 3 | 2 | 5 | 6 | 7 | 8 | 9, 10 | |
| Ji (mi) | – | 0,0055 | 0,032 | 0,011 | 0,061 | 0,161 | 138,65 | 6,46 | 1224,49 |
| i1i (r1i) | – | 1 | 1,566 | 1,2 | 2,87 | 2,34 | 8,9 | 8,9 | 0,227 |
| JПрi | – | 0,0055 | 0,013 | 0,0076 | 0,0074 | 0,029 | 1,750 | 0,0815 | 277,96 |
Суммарный момент инерции определим после выбора электродвигателя.
Моменты M1, M2 и M3 – по заданию даны уже приведенными к валу.
Определим скорости рабочего и холостого хода на валу двигателя:
![]() с-1;
с-1;
![]() с-1;
с-1;
Таким образом, разница между этими скоростями составляет 2%, можно пренебречь этой разницей, что позволит не использовать дополнительное управление электроприводом при переключении режимов.
По найденным данным можно построить нагрузочную диаграмму процесса. Она изображена на рисунке 1.3.
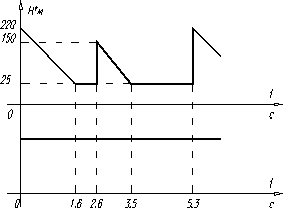
Рисунок 1.3 – Нагрузочная диаграмма.
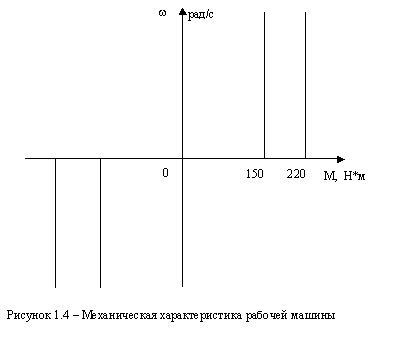
Механическая характеристика рабочей машины изображена на рисунке 1.4
0 комментариев