Навигация
Реализация алгоритма обратной трассировки лучей для моделей с большим числом полигонов
51525
знаков
3
таблицы
9
изображений
Факультет информатики и систем управления
Кафедра "Программное обеспечение ЭВМ и информационные технологии"
Курсовой проект
по машинной графике
Расчетно-пояснительная записка
Тема:
"Реализация алгоритма обратной трассировки лучей для моделей с большим числом полигонов"
Москва 2004
Оглавление
1. Введение
2. Конструкторская часть
2.1 Обоснование использованных алгоритмов
2.2 Структура данных
2.2.1 Источники света
2.2.2 Объекты для визуализации
2.2.3 Текстуры
2.3 Алгоритм обратной трассировки лучей
2.3.1 Описание алгоритма
2.3.2 Математическая основа обратной трассировки лучей
2.3.3 Составление матрицы
2.3.4 Программная реализация
2.3.5 Определение пересечения луча с треугольником
2.3.4 Формирование отраженного луча
2.3.5 Формирование преломленного луча
2.4 Оболочки
2.4.1 Алгоритм построения иерархических оболочек
2.4.2 Алгоритм обхода оболочек в трассировке лучей
2.5 Текстурирование
2.5.1. Процедуры для работы с текстурами
2.5.2. Собственно текстурирование
2.6 Закраска Фонга
2.7 Освещение
2.7.1. Модель освещения Уиттеда
2.7.2 Диффузное отражение
2.7.3 Зеркальное отражение
2.7.4 Фоновая освещенность
2.7.5 Прозрачность
2.7.6 Процедуры расчета освещенности
3. Технологическая часть
3.1 Выбор языка программирования и обоснование выбора
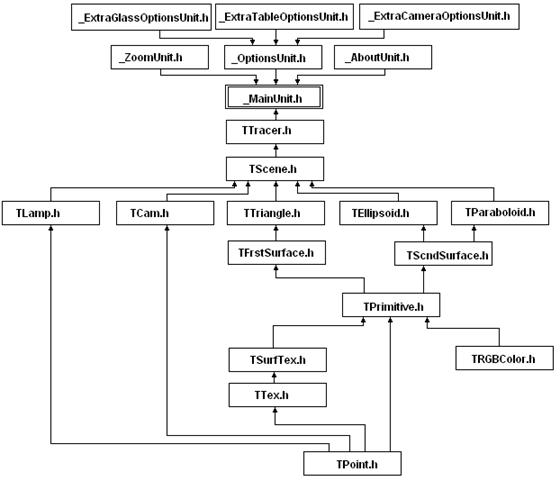
3.2 Модульная структура программы
3.3 Интерфейс программы
4. Экспериментально-исследовательская часть
Тест № 1
Тест № 2
Тест № 3
Заключение
Список литературы
1. Введение
В компьютерной графике на сегодняшний день большое внимание уделяется алгоритмам получения реалистических изображений. Эти алгоритмы являются самыми затратными по времени. Обусловлено это тем, что они должны предусматривать множество физических явлений, таких как преломление, отражение, рассеивание света. Профессиональные программы для кинематографа учитывают еще больше явлений (дифракцию, интерференцию, зависимость коэффициентов преломления, отражения, поглощения от длины волны падающего света, вторичное, третичное отражение света).
В моей курсовой работе для рендеринга применяется алгоритм обратной трассировки. На сегодняшний день он считается одним из лучших для формирования реалистических изображений. Его используют большинство трехмерных графических редакторов. Применяется так же алгоритм z-буфера. Но эффекты отражения и преломления, там достигаются искусственными методами и считаются не совсем точно. Подобным методом пользуются в программах, где крайне важна скорость. Примером таких программ служат компьютерные игры. Почти все они построены на использовании алгоритма z-буфера.
Целью моей курсовой было так же сделать алгоритм обратной трассировки как можно более быстрым. Для этого я применил метод иерархических оболочек. Его применение позволяет сделать время рендеринга, пропорциональным логарифму от числа объектов, а не числу объектов. Добиться с помощью этого реального времени, конечно, не удастся, но делает время ожидания приемлемым, равным порядка 5-30 секунд для 30000 треугольников на сцене.
Модуль Engine программы, может быть использован отдельно, в других программах Delphi. С помощью всего нескольких функций пользователь сможет задать сцену любой сложности и произвести рендеринг сцены. Модуль содержит функции для:
управления камерой
управления источниками света
задания объектов на сцене.
поворота объектов
рендеринга сцены
вывода изображения в задаваемое окно
По использованию модуль Engine очень похож на модуль OpenGL.
2. Конструкторская часть
2.1 Обоснование использованных алгоритмов
Главным алгоритмом, используемым в программе для удаления невидимых граней, а так же моделирования эффектов преломления и отражения, является алгоритм обратной трассировки лучей. Этот алгоритм позволил мне добиться максимальной реалистичности изображения. Он позволяет смоделировать распространение света в пространстве, учитывая законы геометрической оптики. Алгоритм можно быстро модернизировать, добавив в него обработку новых световых явлений. Алгоритм позволяет строить качественные тени с учетом большого числа источников света. Другие алгоритмы не позволяют так просто и качественно строить тени.
Достоинством алгоритма является то, что он не требователен к памяти, в отличие от алгоритма z-буфера. А недостатком является то, что работает он сравнительно долго и не позволяет строить изображения в реальном времени.
Для ускорения алгоритма применен метод иерархических оболочек. Он позволяет сократить время работы алгоритма трассировки в десятки, а на некоторых сценах в сотни раз. Среди всех алгоритмов оптимизации данный оказался самым эффективным. Метод BSP деревьев не дал значительного ускорения, а метод порталов в случае произвольной геометрии сцены вообще не применим. Алгоритм дает наилучшие результаты в сценах, где треугольники имеют примерно одинаковые размеры, а так же в разреженных сценах (т.е. в сценах, где объекты расположены на расстоянии, гораздо большем их линейных размеров).
Для сглаживания изображения применен алгоритм закраски Фонга. Он является самым затратным по времени. Метод Гуро, например, быстрее Фонга примерно в 5 раз. Но время его выполнения от общего времени рендеринга не превышает 3 процентов. Зато он дает великолепные результаты. В частности, блики выглядят куда реалистичнее, чем если использовать метод Гуро.
2.2 Структура данныхСцена представляется набором объектов двух типов: источников света и собственно объектов, которые необходимо визуализировать.
2.2.1 Источники светаИсточники света не имеют никаких геометрических размеров, они являются точечными и не рисуются при рендеринге. Информация об источниках света хранится в массиве Svet. В i-ом элементе массива хранится информация об i-ом источнике света. Элемент массива представляет собой запись:
TLight=record
tip: integer;
lim: real;
Center: TPoint;
R,G,B: real;
DirX,DirY,DirZ: real;
end;
Поле tip содержит информацию о типе источника. Если оно равно 1, то источник светит во все стороны. Если оно равно 2, то источник светит внутри конуса, направляющая которого DirX, DirY, DirZ, а угол при вершине равен 2*Lim. Угол измеряется в радианах. Если тип источника - 3, то источник также светит в конусе, но по мере отклонения от образующей его интенсивность уменьшается и на угле Lim равна нулю.
Поле Center содержит координаты источника в глобальной системе координат.
Поля R,G,B содержат интенсивность источника по красной, зеленой и синей компоненте. Они могут принимать значения от 0 до 1.
Если источник первого типа, то нет необходимости вводить поля DirX, DirY, DirZ и Lim, так как они не требуются для расчета интенсивности.
2.2.2 Объекты для визуализацииОбъекты для визуализации, задаются в виде полигональной модели. Каждый объект представляет собой набор полигонов. В моей курсовой в качестве полигонов выбраны треугольники, так как при этом значительно упрощается текстурирование, сглаживание и процедура пересечения луча с треугольником. Сцена представляет собой набор объектов. Объекты состоят из треугольников. Информация об одном объекте хранится в трех массивах:
Objects (массив объектов), Vse (массив треугольников), Toch (массив точек).
Массив Objects
Элемент массива представляет собой запись:
TObj=record
StartT,EndT: integer;
StartG,EndG: integer;
XC,YC,ZC,R: real;
nnn,NPr: real;
end;
StartT, EndT соответствуют индексам в массиве точек. Они указывают, что точки с номером, большим или равным StartT и меньшим или равным EndT, принадлежат данному объекту.
StartG, EndG соответствуют индексам в массиве треугольников. Они указывают, что треугольники с номером, большим или равным StartG и меньшим или равным EndG, принадлежат данному объекту.
В NPr содержится показатель преломления данного объекта.
В nnn содержится коэффициент затухания света в данном объекте.
Массив Toch
Элемент массива представляет собой запись:
TApex=record
X,Y,Z: real;
nx,ny,nz: real;
end;
Поля X,Y,Z содержат координаты точки.
Поля nx, ny, nz содержат значение нормали в данной точке. Эти поля используются при закраске по методу Фонга.
Массив Vse
Массив содержит полную информацию обо всех треугольниках сцены.
Элемент массива представляет собой запись:
TGran=record
Nom: array [1. .3] of integer;
ColorR,ColorG,ColorB: Byte;
KOt,KPr,KRas,KDif,KBlik: real;
Tek: array [1. .3] of array [1. .2] of integer;
TNom: integer;
PaintType: boolean;
XC,YC,ZC,R: real;
O: integer;
p: real;
end;
Массив Nom содержит номера точек, которые являются вершинами треугольника.
ColorR, ColorG, ColorB содержат цвет треугольника.
Поля KOt, KPr, KRas, KDif, KBlik, содержат оптические коэффициенты поверхности треугольника.
O - номер объекта, которому принадлежит данный треугольник.
XC, YC, ZC, R - координаты центра и радиус сферической оболочки треугольника.
PaintType - способ закраски треугольника.
TNom - номер текстуры, которая наложена на треугольник.
Массив Tek содержит текстурные координаты, каждой вершины треугольника.
Запись треугольника не содержит координат вершин, она содержит ссылки на вершины. Таким образом, сразу несколько треугольников, могут ссылаться на одну и ту же вершину.
Это дает большую экономию памяти, так как общую для всех треугольников вершину нужно описать всего один раз.
Это упрощает изменение координат вершины. Если бы координаты вершин хранились непосредственно в записи треугольника, то пришлось бы изменить все записи треугольников, включающие данную вершину. В данном случае надо изменить координаты только одной точки.
Очень удобно поворачивать, объекты. Если необходимо повернуть заданный объект, достаточно пробежать по всем его точкам и изменить их координаты.
Настройки цвета, коэффициентов и сглаживания у каждого треугольника свои, а не одинаковые у всех треугольников объекта. Это дает большую свободу в формировании сцены.
Коэффициенты затухания и преломления задаются в записи объекта, так как они характеризуют весь объект целиком.
Данная организация не обладает избыточностью, все треугольники и вершины описываются ровно один раз.
К недостаткам можно отнести то, что получение координат вершин треугольника по ссылке занимает больше времени, чем если бы мы читали их непосредственно из записи треугольника.
Иерархические оболочки
Для хранения иерархических оболочек используется массив Shapes. Он состоит из записей:
TShape=record
tip: integer;
S: integer;
G: TSpisok;
S1: integer;
G1: TSpisok;
Low: array [1. .8] of integer;
NLow: integer;
XC,YC,ZC,R: real;
end;
Первый элемент в массиве Shapes соответствует оболочке, включающей все треугольники сцены.
Поле tip принимает два значения: 1 и 2. Если у оболочки нет подоболочек, то tip равен 2, в противном случае равен 1.
G - это указатель на список треугольников, принадлежащих данной оболочке, S - их число.
G1 - это указатель на список треугольников, которые принадлежат оболочке и очень большие, S1 - их число.
Low - массив содержащий номера подоболочек в массиве Shapes, Nlow - число этих подоболочек.
XC, YC, ZC - координаты центра этой оболочки.
R - радиус оболочки.
Таким образом, в памяти разворачивается дерево. Из корня (т.е. из первой оболочки) его легко обойти. Проще всего это можно сделать, пользуясь рекурсивным алгоритмом.
2.2.3 ТекстурыИнформация о текстурах хранится в массиве Tex. Для каждой текстуры хранятся ее размеры (lx, ly) и указатель на область памяти, куда загружена текстура (PT).
TTex=record
lx,ly: integer;
PT: PRGBI;
end
2.3 Алгоритм обратной трассировки лучей2.3.1 Описание алгоритма
Методы трассировки лучей на сегодняшний день считаются наиболее мощными методами создания реалистических изображений. Универсальность методов трассировки в значительной степени обусловлена тем, что в их основе лежат простые и ясные понятия, отражающие наш опыт восприятия окружающего мира.
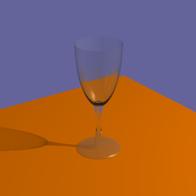
Рассмотрим, как формируется изображение. Изображение получается из-за того, что свет попадает в камеру. Выпустим из источников света множество лучей. Назовем их первичными лучами. Часть этих лучей улетит в свободное пространство, а часть попадет на объекты. На них лучи могут преломиться, отразится. При этом часть энергии луча поглотится. Преломленные и отраженные лучи образуют множество вторичных лучей. Далее эти лучи опять же преломятся и отразятся и образуют новое поколение лучей. В конечном итоге часть лучей попадет в камеру и сформирует изображение.
Существуют алгоритмы, работающие по такому алгоритму. Но они крайне неэффективны, так как большинство лучей, исходящих из источника, не попадают в камеру. А приемлемая картинка получается, если трассировать большое число лучей, что займет очень много времени. Данный алгоритм называется прямой трассировкой лучей.
Метод обратной трассировки лучей позволяет значительно сократить перебор световых лучей. Этот метод разработали в 80-х годах Уиттед и Кэй. В этом методе отслеживаются лучи не от источников, а из камеры. Таким образом, трассируется определенное число лучей, равное разрешению картинки.
Предположим, что у нас есть камера и экран, находящийся на расстоянии h от нее. Разобьем экран на квадратики. Дальше будем по очереди проводить лучи из камеры в центр каждого квадратика (первичные лучи). Найдем пересечение каждого такого луча с объектами сцены и выберем среди всех пересечений самое близкое к камере. Далее, применив нужную модель освещения, можно получить изображение сцены. Это самый простой метод трассировки лучей. Он позволяет лишь отсечь невидимые грани.
Но можно пойти дальше. Если мы хотим смоделировать такие явления, как отражение, преломление, нам необходимо из самого близкого пересечения пустить вторичные лучи. Например, если поверхность отражает свет и она идеально ровная, то необходимо отразить первичный луч от поверхности и пустить по этому направлению вторичный луч. Если же поверхность неровная, то необходимо пустить множество вторичных лучей. В программе это не делается, так как это сильно замедлит трассировку.
Если объект прозрачный, то необходимо построить вторичный луч такой, чтобы при преломлении он давал исходный луч. Некоторые тела могут, обладать свойством диффузного преломления. При этом образуется не один, а множество преломленных лучей. Как и в случае отражения, я этим пренебрегаю.
Таким образом, первичный луч, найдя пересечение с объектом, делится в общем случае на два луча (отраженный и преломленный). Далее эти два луча делятся еще на два и так далее.
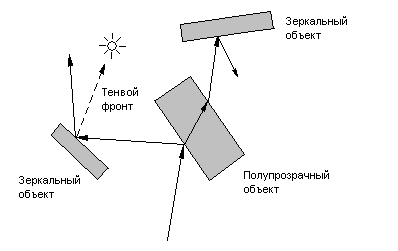
Рис 1.
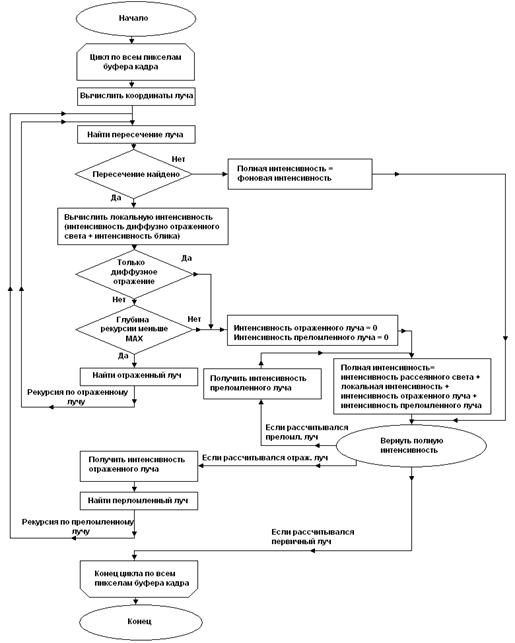
Главной процедурой обратной трассировки лучей в моей программе является процедура Ray. Она имеет следующую структуру:
Если поколение луча равно максимальной глубине рекурсии, то возвращаем среднюю яркость по всем составляющим. Если нет, то идем дальше
Определяем ближайший треугольник, с которым пересекается луч.
Если такого треугольника нет, возвращаем цвет фона, если есть, идем дальше.
Если поверхность, с которой было найдено пересечение, отражает, то формируем отраженный луч и вызываем рекурсивно процедуру Ray с поколением луча, увеличенным на 1.
Если поверхность, с которой было найдено пересечение, преломляет, то формируем преломленный луч и вызываем рекурсивно процедуру Ray с поколением луча, увеличенным на 1.
Определяем итоговую освещенность пиксела, учитывая расположение источников, свойства материала, а так же интенсивности отраженного и преломленного луча.
Я уже рассмотрели ряд ограничений метода трассировки, когда говорили о диффузном преломлении и о неровном зеркале. Рассмотрим и некоторые другие.
Освещать сцену могут только специальные объекты - источники света. Они точечные и не могут поглощать, преломлять и отражать свет.
Свойства отражающей поверхности состоят из двух компонент - диффузной и зеркальной.
При диффузном отражении учитываются только лучи от источников света. Если источник освещает точку, через зеркало (зайчиком), то считается, что точка не освещена.
Зеркальность тоже делится на две составляющие.
reflection - учитывает отражение от других объектов (не источников света)
specular - учитывает блики от источников света
В трассировке не учитываются зависимости от длины волны света:
коэффициента преломления
коэффициента поглощения
коэффициента отражения
Так как я не моделирую диффузное отражение и преломление, то не смогу получить фоновую подсветку. Поэтому вводим минимальную фоновую освещенность. Часто она позволяет просто значительно улучшить качество изображения.
Алгоритм трассировки позволяет рисовать очень качественные тени. Это не потребует большой переделки алгоритма. В него придется кое-что добавить. При расчете освещенности точки необходимо пустить в каждый из источников света "Теневой фронт". "Теневой фронт" - это луч, с помощью которого проверяется, лежит ли что-нибудь между точкой и источником. Если между ними лежит непрозрачный объект, то точка находится в тени. Это значит, что данный источник, не делает свой вклад в итоговую освещенность точки. Если лежит прозрачный объект, то интенсивность источника уменьшается. Прорисовка теней является очень затратной по времени. Так что, в некоторых ситуациях их отключают.
В моей программе есть возможность включить сглаживание изображения. Сглаживание заключается в том, что для определения цвета пиксела. пускается не один луч, а четыре и определяется среднее значение цвета у этих лучей. Если необходимо найти цвет пиксела (i,j), то пускаются 4 луча в точки экранной плоскости с координатами (i-0.25,j-0.25), (i-0.25,j+0.25), (i+0.25,j-0.25), (i+0.25,j+0.25).
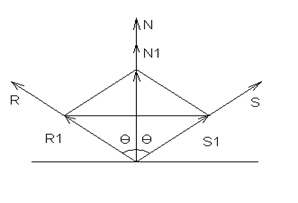
2.3.2 Математическая основа обратной трассировки лучейКоординаты всех объектов сцены определены в некой глобальной системе координат (в том числе и камеры). После формирования первичного луча создадим подсистему, у которой центр совпадает с точкой выхода луча и ось OZ направлена по лучу. Вычислим матрицу перехода из первой системы координат во вторую. Это позволит просто искать пересечения с треугольником, со сферой, векторы преломления и отражения. При необходимости переводим координаты нужных объектов в новую систему координат и работаем уже в ней. Если необходимо построить вторичный луч, создаем еще одну систему координат, связанную с вторичным лучом, и считаем матрицу для перехода из 2 системы в 3. Чтобы получить матрицу перехода из 1 в 3 необходимо умножить матрицу перехода из 2 в 3 умножить на матрицу перехода из 1 в 2. Таким образом, мы работаем все время в какой-то подсистеме. Нам не надо переводить никакие координаты обратно в глобальную систему. Поэтому не надо и составлять обратную матрицу.
2.3.3 Составление матрицы
Составление матрицы преобразования из текущей системы координат в систему координат, центр которой находится в точке (x, y, z) и ось OZ которой направлена по (dx, dy, dz). Для такого преобразования необходимо:
совершить сдвиг в точку (x, y, z)
совершить поворот вокруг OZ
совершить поворот вокруг OX
1. Матрица сдвига: 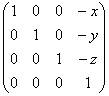 .
.
Похожие работы
... -либо объект, а уходит в свободное пространство, то на этом трассировка для этого луча заканчивается. При практической реализации метода обратной трассировки вводят ограничения. Некоторые из них необходимы, чтобы можно было в принципе решить задачу синтеза изображения, а некоторые ограничения позволяют значительно повысить быстродействие трассировки. Ограничения при реализации трассировки. ...

... решения Bliss 9800 GTX 512MB мы не имеем. 3. Экономический расчет стоимости анализа обьекта Целью экономического расчета дипломного проекта является выбор оптимальной видеокарты для дизайнерского моделирования ООО "Бест Вей корп.", качественная и количественная оценка экономической целесообразности создания, использования и развития этой видеокарты, а также определение организационно- ...
... в видео карты. Дальше рассматривается подробно и в отдельности об устройстве и характеристиках звуковых карт, видео карт и CD-ROM приводах. Аппаратные средства мультимедиа: · Средства звукозаписи; · Звуковоспроизведении; · Манипуляторы; · Средства «виртуальной реальности»; · Носители информации (CD-ROM); · Средства передачи; · Средства записи; · Обработки ...
0 комментариев