Введение
Цель курсовой работы получить навыки расчета линейных стационарных САУ с микропроцессорными регуляторами.
В первой половине работы применить метод расчета последовательного корректирующего устройства, основанного на использовании логарифмических частотных характеристик, а также исследовать динамику САУ моделированием ее на ПЭВМ в системе ''MATLAB ~ Simulink.
Во второй половине работы на основании полученной передаточной функции корректирующего устройства рассчитывается дискретная передаточная функции регулятора. Далее производится исследование динамики уже дискретной системы.
В связи с использованием в контуре управления Микропроцессорного регулятора, помимо обычных требований по обеспечению устойчивости, точности и качества проектируемой САУ, учитываются требования к шагам квантования сигналов по уровню и по времени. Частоты квантования по уровню и времени выбираются так, что система приближенно может рассматриваться как линейная непрерывная САУ. Это позволяет использовать для расчета закона управления простой и эффективный аппарат логарифмических частотных характеристик. Затем закон управления представляется в дискретной форме для получения переходного процесса уже в дискретной системе.
В качестве критерия правильности расчета можно поставить идентичность переходных процессов в линейной и микропроцессорной системе, выбирая соответствующий период квантования по времени.
1. Неизменяемая часть системы
Проектирование САУ всегда начинается с анализа объекта, формулировки задачи функционирования проектируемой системы, выбора критерия качества системы или задания требований к системе.
Будем считать, что этап анализа объекта, получения уравнений объекта и их линеаризация, выбор исполнительного механизма и датчиков уже решен, Полученные данные будут составлять так называемую неизменяемую часть системы.
Получим, что передаточная функция такой неизменяемой части системы имеет вид
2. Структурная схема САУ с микропроцессорным регулятором
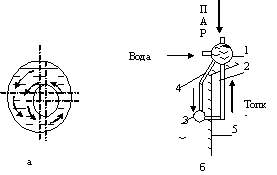
Поскольку микропроцессорный регулятор построен на базе Микро-ЭВМ и может обрабатывать сигналы только дискретной формы" а сигнал на выходе объекта Ux и регулирующий сигнал Ur - непрерывны, то необходимо использовать преобразователи сигналов. АЦП - аналогово-цифровой преобразователь осуществляет кодирование непрерывного сигнала Ux дискретным сигналом 1х- ЦАП -цифро-аналоговый преобразователь преобразовывает дискретный сигнал регулирования 1г в непрерывный Ur. В процессе аналого-цифрового преобразования осуществляется квантование сигнала по времени и по уровню и это оказывает серьёзное влияние на динамические процессы в САР.
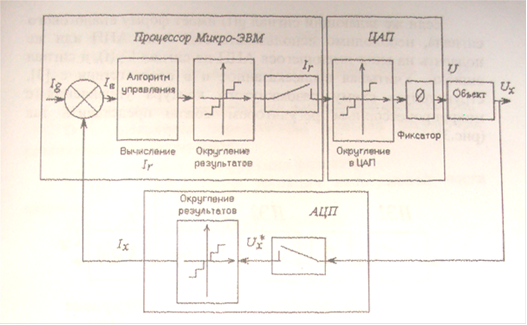
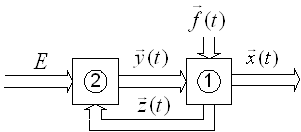
Рис. 2
На рис. 2 представлена в общем виде структурная схема САР с микропроцессорным регулятором и форма используемых в такой системе сигналов [1]. Непрерывный сигнал Ux(t) с выхода объекта поступает сначала в АЦП, где производится квантование сигнала по времени с постоянным шагом То в моменты t - 0, То, 2То, ... , кТо.
В результате этого будет получен дискретный сигнал u*x(k)<. д^^ производится квантование сигнала по уровню путём округления Ух Д° ближайшего стандартного значения Полученный при этом сигнал 1г представляет собой последовательность цифровых двоичных кодов, которые в дискретные моменты времени передаются в процессор и Микро-ЭВМ вырабатывает дискретный сигнал ошибки на основе которого в каждый тактовый момент времени 0' Т 2Т0,.... кТо вычисляется в соответствии с выбранным законом регулирования регулирующий сигнал Щ), Тх в процессе вычисления регулирующего воздействия могут использоваться операции умножения или другие арифметические операции, приводящие к переполнению разрядной сетки Микро-ЭВМ, полученный сигнал вновь подвергается округлению, а затем в дискретные моменты времени выдаётся в ЦАП. Если число разрядов микропроцессора и ЦАП не совпадают, в ЦАП вновь производится округление. На выходе ЦАП имеется экстраполятор, который превращает цифровой код в аналоговый кусочно линейный сигнал. В Микро-ЭВМ чаще всего используются экстраполяторы нулевого порядка, которые носят название фиксаторов и превращают цифровой код в аналоговый ступенчатый сигнал. Этот сигнал воздействует на исполнительный механизм, осуществляя процесс регулирования. В приведённой на рис.2 схеме САР задающей сигнал Ig имеет цифровую форму.
Такой сигнал может быть получен от специального цифрового датчика или другой Микро-ЭВМ.
Функциональная схема линейной САУ
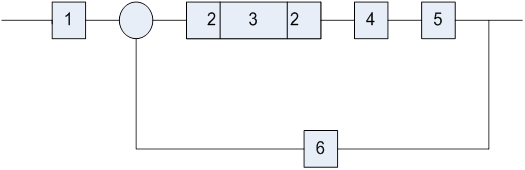
1 – датчик входного сигнала
2 - согласующий усилитель
3 - последовательное КУ
4 – исполнительный элемент (двигатель)
5 - управляемый объект
6 – датчик выходного сигнала (температуры)
g – заданное значение температуры
Ux – температура на выходе системы
E – ошибка
U – управляющее воздействие
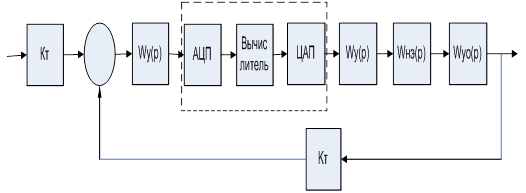
Функциональная схема МП САУ

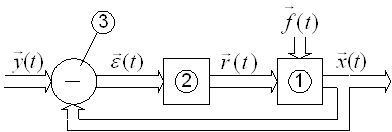
Структурная схема линейной САУ

Структурная схема МП САУ
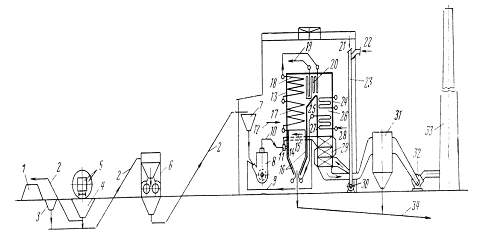
В рассматриваемой системе регулирования температуры технологического процесса учтем исходные данные, характеризующие неизменяемую часть системы.
Кроме этого к системе предъявляются следующие требования:
· максимальное перерегулирование σ = 30 %;
· максимальное время регулирования: t = 55 сек;
· запас устойчивости по фазе Δφ (Град) должен лежать в пределах 35° - 65° в соответствии с диапазоном изменения σ % от 40% до 20% в исходных данных
· Коэффициенты ошибок Do= 0 D = 0,058
В нашем случае передаточная функция неизменной части системы имеет вид:
![]()
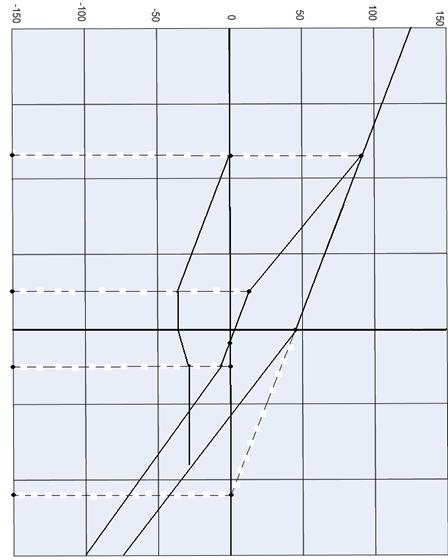
Для построения ЛЧХ на оси частот выбираем точку ![]() 1/с и проводим асимптоту с наклоном -20 дБ/дек
1/с и проводим асимптоту с наклоном -20 дБ/дек
Построение необходимо проводить в соответствии с выражением ЛЧХ
![]()
Фазочастотную характеристику строим по формуле:

|
| 0.1 | 0.2 | 0.5 | 0.8 | 1 |
|
| -135,57 | -154,3 | 171,56 | 176,5 | 180 |
В рассматриваемой РГР σ = 30 % и t = 55 сек.
Из таблицы находим B = 11,3; Wср=0,2 1/с
Найдем
![]() 0.2
0.2
L1=15 дБ
![]()
Синтез линейной САУ
Определим передаточную функцию желаемого регулятора
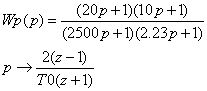
Определим передаточную функцию корректирующего устройства
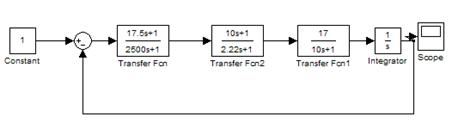
Передаточная функция замкнутой системы имеет вид:

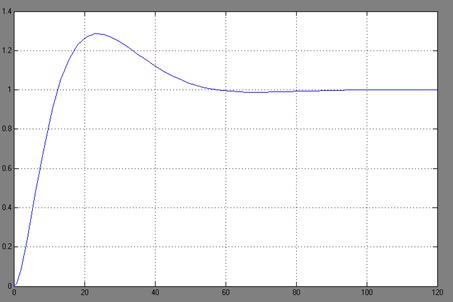
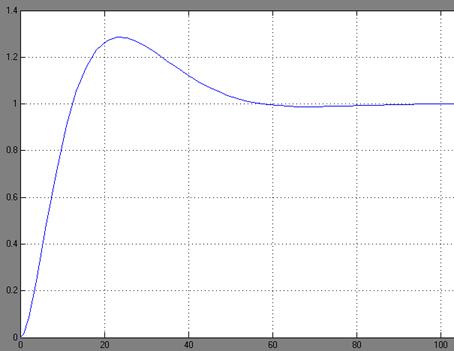
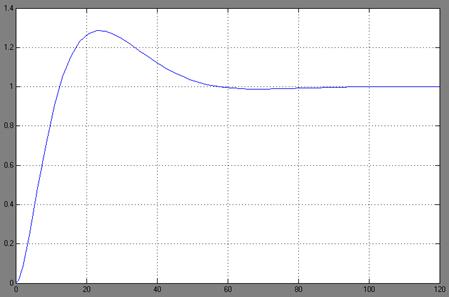
Получим переходный процесс в системе моделированием её на ЭВМ.
Переходный процесс в линейной САУ
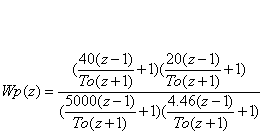
Определение дискретной передаточной функции корректирующего звена.
При T0 = 0.35
При T0 = 0.25
При T0 = 0.1
Для моделирования САУ в пакете "ДИСПАС" соответствующее уравнение имеет вид:

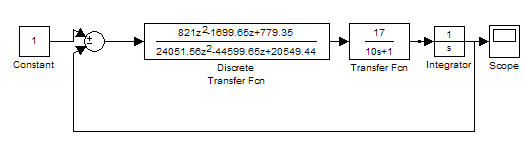
Переходный процесс в дискретной САУ при шаге квантования
Т=0.35
Схема моделирования при Т0=0.35
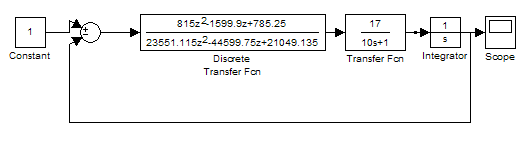
Переходный процесс в дискретной САУ при шаге квантования
Т=0.25
Схема моделирования при Т0=0.25
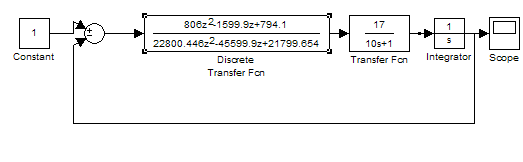
Переходный процесс в дискретной САУ при шаге квантования
Т=0.1
Схема моделирования при Т0=0.1
Выводы
В результате проделанной работы было выяснено, что независимо от того, каким способом анализировать результаты разработки САУ с микропроцессорным регулятором, в результате анализа необходимо получить график переходного процесса.
Вывели дискретную передаточную функцию регулятора, для того чтобы исследовать динамику САУ с микропроцессорным регулятором, так же выбрали шаг квантования Т0. Для исследования системы и решения задачи можно использовать пакет "MATLAB" и др. По полученному графику убедились в устойчивости системы. Убедились, что процессы в линейной и дискретной САУ идентичны, следовательно расчеты произведены верно и задачу можно считать выполненой.
Похожие работы


... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
... и сигнализация нарушений и аварийных ситуаций с их протоколированием; Возможность дистанционного управления регулирующими исполнительными механизмами; Надежность. Для более эффективного функционирования системы автоматизации можно предъявить к Scada-пакету следующие требования: Контроль над технологическим процессом, состояние технологического оборудования и управление процессами и ...

... МПа, пределы измерений 0…1,6 МПа МС-П2 3 по месту Приборы в спецификации могут быть сгруппированы по позициям на схеме или по маркам. Часть 3. Современные системы управления производством. 1. Структура АСУ ТП. Характерной особенностью развития современной электронной промышленности является бурный рост, сопровождающийся столь же бурным снижением стоимости средств ...
... .3 +810.3 Срок окупаемости Лет -- 0.242 -- Вывод Из данного расчета и проведенного анализа технико-экономических показателей делаем вывод о целесообразности внедрения «Автоматизированной системы управления компрессорной установкой». Так как в результате годовая экономия затрат от автоматизации системы составляет 3347839.05 рублей. Это достигается за счет экономии в зарплате 785925.5 ...
0 комментариев