Навигация
Моделирование движения на плоскости
12594
знака
2
таблицы
9
изображений
БЕЛОРУССКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Теория механизмов и машин» Моделирование движения на плоскости КУРСОВАЯ РАБОТАпо курсу «Информатика»
Исполнитель Лабоцкий Д.В.2006
Содержание
Введение
1. Постановка задачи
2. Математическая модель объекта или процесса
3. Алгоритм решения задачи
4. Схема алгоритма решения задачи
5. Таблица идентификаторов
6. Текст программы
7. Распечатка результатов
8. Графическое представление результатов
9. Анализ результатов
Литература
Введение
Современная технология изготовления разнообразных конструкций, механизмов, машин предполагает обязательное проведение точных расчетов, моделирования и испытания моделей. Для использования всевозможных процессов и явлений в эксплуатационных целях необходимо предоставить расчет их параметров и характеристик. В процессе обработки или сборки деталей приходится перемещать их на определенные расстояния. Для обеспечения точности и производительности, минимальных затрат энергии и ресурсов целесообразно применять автоматизированные системы.
1. Постановка задачи
Вал с моментом инерции I0=2,5 кг·м2, на который действует момент движущих сил
Md=M0+ln(φ+1)+![]()
где М0=15,5 Нм, и момент сил сопротивления Мс=10 Нм, разгоняется при повороте на угол φр=0,2 рад/с, n=8. После этого действие движущего момента прекращается (момент Мс продолжает действовать), начинается торможение, в процессе которого вал повернется до остановки на угол φt за счет накопленной при разгоне кинетической энергии.
Требуется:
- определить зависимости от угла поворота φ скорости ω(φ), ускорения ε(φ), времени t(φ);
- установить время Тр поворота на угол φр и время Тt поворота на угол φt;
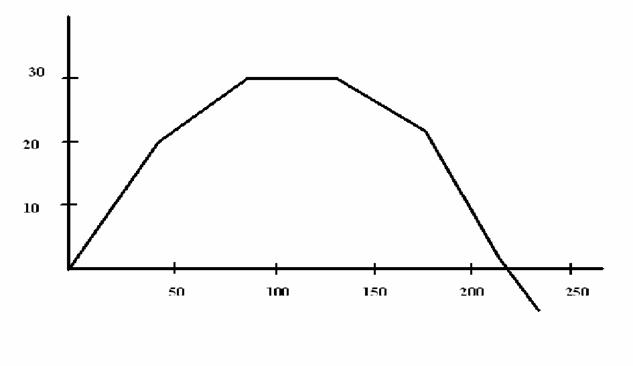
- по полученным данным построить графики ω(φ), ε(φ), t(φ) для интервала угла поворота [0, φр+φt].
При вычислении зависимости ω, ε, t от угла поворота будет получена табличная зависимость, при этом учтем, что зависимость времени от угла поворота, является функцией монотонно возрастающей.
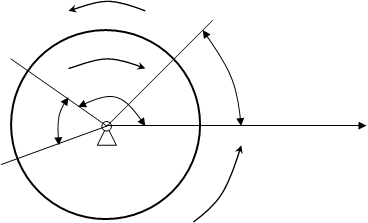 Мd
Мd
Mc
φp φ
φt
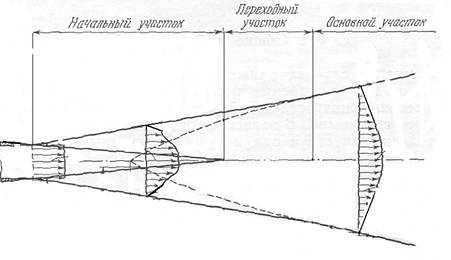
Схема, поясняющая словесную постановку задачи для определения параметров движения при вращательном движении.
2. Математическая модель объекта
Анализ вращательного движения тела показывает, что исходными данными для определения параметров движения (перемещения, скорости, ускорения, времени) являются моменты инерции (I0), движущие моменты (Мd), и моменты сопротивления (Мс), а также начальные значения параметров движения.
При использовании дискретной модели задачи весь путь разбивается на некоторое количество элементарных участков длиной Δφ=φi-φi-1.
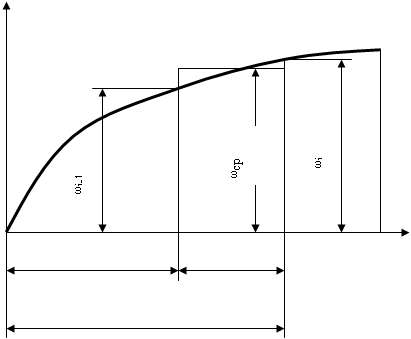
V
φi-1 Δφ φ
φi
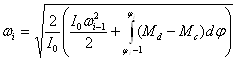
На каждом интервале связь кинематических, силовых и массовых параметров описывается теоремой об изменении кинетической энергии, в частности:
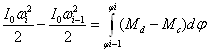
откуда можно выразить скорость движения:
При определении времени Δt прохождения участка Δφ будем считать скорость движения постоянной, равной средней скорости в пределах участка:
![]()
Тогда Δt=ti-ti-1=![]() ,
,
откуда ti=ti-1+![]() или ti=ti-1+
или ti=ti-1+![]()
Аналогично, предполагая, что ускорение ε i на участке Δφ постоянно, имеем:
ε i= ε cp=![]()
Применим построенную математическую модель к расчету параметров вращательного движения тела на участке разгона [0, φp] и на участке торможения [φp, φp+φt].
Похожие работы
... порыв ветра, интенсивность горения пороха, влажность и т.д. Из всех случайных величин рассмотрим только сопротивление воздуха. Учитывая то, что сопротивление воздуха направленно в противоположную сторону движения тела [4], то силу сопротивления можно представить в виде двух составляющих: вертикальной и горизонтальной, при этом, чем выше скорость, тем больше сопротивление и наоборот. Выделим ...
... проведения коррекции траектории МКА, моделирования процесса, и расчет потребного топлива для проведения коррекции траектории. 3) Исследование динамики системы коррекции траектории при стабилизации углового положения в процессе проведения коррекции траектории МКА. 2.4. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ЦЕНТРА МАСС МКА 2.4.1.УРАВНЕНИЕ ДВИЖЕНИЯ КА Рассмотрим невозмущенное движение материальных точек М и m в ...
... или снега, в следах пробуксовки отсутствует поверхностный слой, покрывающий дорогу. О направлении движения буксующего автомобиля в этих случаях можно судить по направлению движения частиц дорожного полотна, выбрасываемых буксующим колесом. Наиболее ярко это явление наблюдается при буксовке колеса на снегу, песке, на сырой грунтовой дороге. Выбрасываемые буксующим колесом частицы располагаются по ...

... диаметрах критического сечения представлены на рисунке 2.24 Рисунок 2.24 - Зависимость оптимальной высоты поднятия фурмы от давления при различных диаметрах критического сечения сопла Лаваля 3. Численное исследование движения жидкости Приведены уравнения Навье - Стокса установившегося осесимметричного движения несжимаемой вязкой жидкости в переменных функция тока - вихрь. Проведено ...
0 комментариев