Навигация
РАЗРАБОТКА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ
21496
знаков
1
таблица
3
изображения
6 РАЗРАБОТКА УПРАВЛЯЮЩЕЙ ПРОГРАММЫ
Листинг управляющей программы приведен в приложении А.
Для отображения информации в памяти следует выделить 12 байт, в каждом из которых будет храниться код отображаемого символа. Подпрограмма преобразования числа в последовательность выполняет деление машинного слова на 10 с остатком, поэтому для нее необходимо 6 байт: по два для делимого, частного и остатка. Подпрограмма расчета стоимости выполняет умножение и деление слов, поэтому для нее необходимо выделить 8 временных регистров. При выделении регистровой памяти учтено, что регистры r0–r15 не могут использоваться в ряде команд, например, при сравнении. В оперативной памяти также следует выделить 10 ячеек под таблицу для расшифровки скан-кодов цифровых клавиш. Под вес, цену и стоимость в памяти выделяется по два байта.
После подачи сигнала сброса RESET производится начальная загрузка регистров, с помощью которых реализуется настройка портов ввода/вывода и оцифровка аналогового сигнала, а также инициализация таблицы рашифровки скан-кодов. После инициализации программа входит в бесконечный цикл. Опрос клавиатуры происходит путем поочередной установки в низкий уровень линий PB4–PB6 и чтения линий PB0–PB3. Далее скан-код клавиши распознается программно, под него выделен регистр r13. При выполнении процедуры ввода данных скан-код расшифровывается при помощи таблицы и конечное значение символа, введенного с клавиатуры, записывается в регистр r14.
Регистры r16–r25 используются для временного хранения данных.
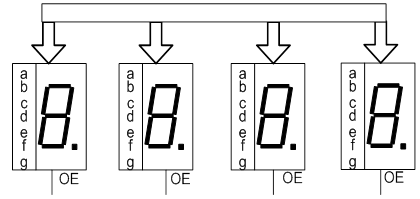
При разработке процедуры отображения информации необходимо учитывать, что экран должен полностью обновляться с частотой не менее 40Гц, следовательно, с учетом того, что дисплей имеет 16 индикаторов, активный индикатор должен меняться не позже, чем через каждые 1,5625мс. Основной цикл программы, в котором происходит обновление отображаемой информации, занимает меньше времени
Микроконтроллер работает с целыми числами, дробная часть будет лишь имитироваться путем подсвечивания запятой возле соответствующего символа на дисплее.
7 ЗАКЛЮЧЕНИЕ
В контроллере можно использовать любые микросхемы семейства AVR, в зависимости от поставленных задач. Контроллер обладает резидентной памятью и множеством встроенных вспомогательных устройств, что значительно упрощает схемотехническую реализацию системы управления. Благодаря тому, что контроллер является перепрограммируемым, в системе управления электронными весами достаточно легко можно менять диапазоны веса, цены и стоимости.
ЛИТЕРАТУРА
1. Шарапов А.В. Примеры решения схемотехнических задач: Учебное пособие. - Томск: ТИАСУР, 1994. - 141 с.
2. Шарапов А.В. Цифровая и микропроцессорная техника: Учебное пособие. 2-е изд., перер. и доп. - Томск: Изд-во Том. ун-та, 1997. - 108 с.
3. Сташин В.В., Урусов А.В., Мологонцева О.Ф. Проектирование цифровых устройств на однокристальных микроконтроллерах. - М.: Энергоатомиздат, 1990. - 224 с.
4. Калабеков Б.А., Мамзелев И.А. Цифровые устройства и микропроцессорные системы: Учебник для техникумов связи. - М.: Радио и связь, 1987. - 400 с.
5. Микропроцессоры и микроЭВМ в системах автоматического управления: Справочник/ С.Т.Хвощ, Н.Н.Варлинский, Е.А.Попов; Под общ. ред. С.Т.Хвоща. - Л.: Машиностроение, 1987. - 640 с.
6. http://www.atmel.com/dyn/resources/prod_documents/2466S.pdf - польное руководство по работе с контроллером Atmega16. Электронный ресурс.
Приложение А. ЛИСТИНГ УПРАВЛЯЮЩЕЙ ПРОГРАММЫ
.include "m16def.inc";Включить определения для контроллера Atmega16
.def scancode=r13
.def key=r14
.def pointer=r15; используется для ввода данных
.equ entercode=0xD7;код клавиши ввода
.DSEG; резервирование памяти
status: .BYTE 1 ;байт статуса
weight: .BYTE 2 ;вес
price: .BYTE 2 ;цена
cost: .BYTE 2 ;стоимость
key_table .BYTE 10;таблица сканкодов
dysplay_table: .BYTE 16;выделить 16 байт как буфер дисплея
.CSEG
; перед началом выполнения программы контроллер проверяет векторы прерываний
rjmp RESET ; Reset Handler
nop
reti EXT_INT0 ; INT0 Handler
nop
reti EXT_INT1 ; INT1 Handler
nop
reti TIM2_COMP ; Timer2 Compare Handler
nop
reti ;TIM2_OVF ; Timer2 Overflow Handler
nop
reti ;TIM1_CAPT ; Timer1 Capture Handler
nop
reti ;TIM1_COMPA ; Timer1 CompareA Handler
nop
reti ;TIM1_COMPB ; Timer1 CompareB Handler
nop
reti ;TIM1_OVF ; Timer1 Overflow Handler
nop
reti ;TIM0_OVF ; Timer0 Overflow Handler
nop
reti ;SPI_STC ; SPI Transfer Complete Handler
nop
reti ;USART_RXC ; USART0 RX Complete Handler
nop
reti ;USART_DRE ; USART0,UDR Empty Handler
nop
reti ;USART_TXC ; USART0 TX Complete Handler
nop
reti ;ADC ; ADC Conversion Complete Handler
nop
reti ;EE_RDY ; EEPROM Ready Handler
nop
reti ;ANA_COMP ; Analog Comparator Handler
nop
reti ;TWI ; Two-wire Serial Interface Interrupt Handler
nop
reti ;TIM0_COMP ; Timer0 Compare Handler
nop
reti ;EXT_INT2 ; INT2 Handler
nop
reti ;SPM_RDY ; SPM Ready Handler
nop
;инициализация
reset: out DDRB, 0xF0; Старшая тетрада порта PB настраивается на вывод, младшая – на ввод
out DDRС, 0xFF; Порты PC и PB настраиваются на вывод
out DDRD, 0xFF;
out ADMUX, 0x40; АЦП работает с внешним опорным сигналом, канал 0.
out SFIOR, 0x00; АЦП работает автоматического обновления данных.
out ADCSRA, 0xC0; Запуск АЦП.
ldi r26,low(key_table);заполнение таблицы скан-кодов
ldi r27,high(key_table)
ldi r16,0xE7; клавиша «0»
st X+,r16
ldi r16,0xEE; клавиша «1»
st X+,r16
ldi r16,0xDE; клавиша «2»
st X+,r16
ldi r16,0xBE; клавиша «3»
st X+,r16
ldi r16,0xED; клавиша «4»
st X+,r16
ldi r16,0xDD; клавиша «5»
st X+,r16
ldi r16,0xBD; клавиша «6»
st X+,r16
ldi r16,0xEB; клавиша «7»
st X+,r16
ldi r16,0xDB; клавиша «8»
st X+,r16
ldi r16,0xBB; клавиша «9»
st X+,r16
;опрос клавиатуры
begin: ldi scancode,0xFF
ldi r19,0x00; обнуление счетчика антидребезгового цикла
l3: ldi r16,0x01; задается опрашиваемая линия
l1: mov r17,temp1; номер опрашиваемой линии преобразуется для обнуления
neg r17 ; соответствующего вывода
out PORTB,r17
in r17, PINB; чтение сканкода
ori r17,0x80
cpi r17,0xFF ;если клавиша нажата, то запомнить ее сканкод для
breq l4 ; обработки в антидребезговом цикле
mov r18,r17
l4: lsl r16 ;следующая линия
cpi r16,0x10
brne l1 ;если опрошены все линии, переходим к следующему шагу
cpi r19,0x00
breq l2
cp r18,scancode
brne l5;если текущий скан-код не равен предыдущему, то нажатие случайное
l2: mov scancode,r18
inc r19
cpi r19,0x03 ;антидребезговый цикл
brne l3
;опрос режима
l5: ldi r26,low(status)
ldi r27,high(status)
ld r16,X; загружается адрес байта состояния
cpi r16,0x01
breq l6;если status=1, то перейти к вводу данных
cpi scancode,entercode; если не нажат «Ввод»,
brne l7; то перейти пересчету данных
ldi r16,0x01; иначе войти в режим ввода данных
st X,r16
ldi r16,0
move pointer,r16
jmp display
;пересчет данных
l7: in r16,low(ADC);чтение АЦП
in r17,high(ADC)
;пересчет единиц АЦП в реальный вес. Вес равен 1000*ADC/1024, операции умножения и деления на константу реализованы путем операций сдвига и вычитания
mov r18,r16
mov r19,r17
lsl r16
rol r17
lsl r16
rol r17
lsl r16
rol r17
lsl r16
rol r17
lsl r16
rol r17
lsl r16
rol r17
sub r16,r18
sbc r17,r19
sub r16,r18
sbc r17,r19
sub r16,r18
sbc r17,r19
lsr r17
ror r16
lsr r17
ror r16
lsr r17
ror r16
lsr r17
ror r16
lsr r17
ror r16
lsr r17
ror r16
ldi r26,low(weight)
ldi r27,high(weight)
st X+,r16
st X+,r17
;расчет стоимости
ld X+,r18;загрузка значения цены из памяти
ld X+,r19;загрузка значения цены из памяти
ldi r20,0
ldi r21,0
ldi r22,0
ldi r23,0
ldi r24,0
ldi r25,0
ldi r0,0
ldi r2,0
ldi r3,0
;умножение цены на вес
l11: add r20,weight_l
adc r21,weight_h
adc r22,r0
adc r23,r3
inc r24
adc r25,r0
cp r24,r18
cpc r25,r19
brne l11
;деление на тысячу
l12: ldi r24,0xE8
ldi r25,0x03
cp r20,r24
cpc r21,r25
ldi r24,0
cpc r22,r24
cpc r23,r24
brne l13
ldi r24,0xE8
sub r20,r24
sbc r21,r25
sbc r22,r0
sbc r23,r0
ldi r24
add r2,r24
adc r3,r0
rjmp l12
l13: st X+,r20;загрузка стоимости в память
st X+,r21
;преобразование чисел в символы
ldi R26,low(dysplay_table); загрузка начального адреса буфера
ldi R27,high(dysplay_table); дисплея в регистр X.
ldi r16,0; заполнение буфера нулевыми символами
ldi r17,0
cpi r16,16
brlo l14
st X,r17
inc к16
l14: ldi r28,low(weight)
ldi r29,high(weight)
ld Y+,r16; загрузка веса из памяти
ld Y+,r17
rjmp IntToStr
ldi r26,low(dysplay_table+4); загрузка начального адреса буфера
ldi r27,high(dysplay_table+4); дисплея в регистр X.
ld Y+,r16; загрузка цены из памяти
ld Y+,r17
rjmp IntToStr
ldi r26,low(dysplay_table+8); загрузка начального адреса буфера
ldi r27,high(dysplay_table+8); дисплея в регистр X.
ld Y+,r16; загрузка стоимости из памяти
ld Y+,r17
rjmp IntToStr
rjmp display
;считывание данных с клавиатуры
l6: ldi r26,low(key_table); загрузка начального адреса
ldi r27,high(key_table); таблицы скан-кодов
lde r17,0
l15: ld r16,X+
cp r16,scancode; расшифровка скан-кода
breq l16; если нужный скан-код найден, переход к заполнению данных
inc r17
cpi r17,11
breq l18
rjmp l15
l18: cpi scancode,0xD7; обработка нажатия ввода
brne display
ldi r20,0
ldi r28,low(dysplay_table +3); загрузка конечного адреса
ldi r29,high(dysplay_table +3); символов, отображающих цену
;перевод данных из строкового вида в числовой
l19: ld r16,Y-
ldi r17,0
mov r18,r16
mov r19,r17
lsl r16
rsl r17
lsl r16
rsl r17
lsl r16
rsl r17
lsl r16
rsl r17
add r16,r18
adc r17,r19
add r16,r18
adc r17,r19
ld r18,Y
ldi r19,0
add r16,r18
adc r17,r19
inc r20
cpi r20,3
brne l19
ldi r28,low(price); загрузка конечного адреса
ldi r29,high(dysplay_table +3); символов, отображающих цену
st Y+,r16
st Y+,r17
jmp display
l16: mov key,r17
mov r17,pointer
cpi r17,0
brne l18
; если заполнение начато заново, обнуляется вся строка
ldi r28,low(dysplay_table); загрузка начального адреса символов,
ldi r29,high(dysplay_table); отображающих цену
ldi r16,0
st Y+,r16
st Y+,r16
st Y+,r16
st Y+,r16
ldi r26,low(dysplay_table +7); загрузка адреса конца строки,
ldi r27,high(dysplay_table +7); отображающей цену
ldi r28,low(dysplay_table +6); загрузка адреса предпоследнего
ldi r29,high(dysplay_table +6); символа строки, отображающей цену
ld r16,Y-
st X-,R16
ld r16,Y-
st X-,R16
ld r16,Y-
st X-,R16
st Y,key; запись символа
ldi r16,1
add r17,r16
cpi r17,4
brlo l17
ldi r17,0
l17: mov pointer,r17
;отображение на дисплее
display: ldi r26,low(dysplay_table); загрузка начального адреса буфера
ldi r27,high(dysplay_table); дисплея в регистр X.
ldi r16,0x00; r16 используется для адресации индикатора
l8: ld r17,X+; r17 используется для временного хранения кода символа
andi r16,0x0F
lsl r17;формирование байта для отправки на дисплей
lsl r17
lsl r17
lsl r17
add r17,r16
out PORTC,r17
cpi r16,0x01
breq l9
cpi r16,0x05
breq l9
cpi r16,0x0A
breq l9
out PORTD,0x01; гашение запятой
rjmp l10
l9: out PORTD,0x00; отображение запятой
l10: cpi r16,0x0F
brne l8
;подпрограмма преобразования числа в строку
IntToStr: ldi r20,10
ldi r21,0
ITS4: cp r16,r20
cpc r17,r21
brlo ITS1
mov r18,r16
mov r19,r16
ldi r16,0
ldi r17,0
ITS2: cp r18,r20
cpc r19,r21
brlo ITS3
sub r18,r20
sbs r19,r21
inc r16
adc r17,r19
rjmp ITS2
ITS3: ld X+,r16
rjmp ITS4
ITS1: ld X+,r16
reti
Похожие работы
... условия на модуль МПС16 инструкции по эксплуатации или технические описания средств измерений и контроля. Перечень средств измерения и контроля, инструмента, применяемых при проведении настройки субблока модуля управления МПС, приведен в таблице 6. Таблица 6 Наименование Тип или обозначение Количество Технологический модуль МПС16-01 (без ячейки ЯМ101) АГКР.465653.001 1 Источник ...


... их на соответствующий порт, также необходимо вывести десятичную точку P2.7. Заключение В результате проделанной работы были разработаны электронные весы с диапазоном измерения от 0 до 250 килограмм, с точностью измерения 500 грамм, с микропроцессорным управлением. Точность измерения не зависит от положения объекта на весах. Габаритные размеры весов 5000x5000 мм. Электронные весы работают от ...
... показана на рисунке 8.4 Величина резистора R выбирается из условия [12] 240 Ом < R < 1,5 кОм.(8.5) Рисунок 8.4 Период генерируемых импульсов (8.6) 9. ФУНКЦИОНАЛЬНЫЕ УСТРОЙСТВА КОМПЬЮТЕРНОЙ (ЦИФРОВОЙ) ЭЛЕКТРОНИКИ 9.1 Комбинационные цифровые устройства (КЦУ) Логические устройства, выходные сигналы которых однозначно определяются комбинацией входных логических ...
... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
0 комментариев