Навигация
Линейное программирование
20533
знака
10
таблиц
1
изображение
Министерство образования РФ
Южно-Уральский государственный университет
Кафедра Автоматики и управления
Реферат
по математическим основам теории систем
на тему
Линейное программирование
Выполнил:
Группа: ПС-263
Проверил: Разнополов О. А.
Челябинск
2003
1. Введение
При постановке задачи организационного управления, прежде всего, важно
1. Определить цель, преследуемую субъектом управления.
2. Установить, значениями каких переменных исследуемой системы можно варьировать.
Под целью будем понимать тот конечный результат, который необходимо получить путём выбора и реализации тех или иных управляющих воздействий на исследуемую систему. В производственно-коммерческой сфере цель заключается в том, чтобы либо максимизировать прибыль, либо минимизировать расходы.
Когда цель определена, оптимальным считается такой способ действий, который в наибольшей степени способствует достижению этой цели. Однако «качество» реализации процедуры выбора зависит от того, насколько полно известны допустимые альтернативы управляющих воздействий. Требуется выявить полное множество так называемых управляемых переменных. Важным моментом при принятии управляющих решений является идентификация неуправляемых переменных, то есть субъекта управления. Для построения математической модели необходимо иметь строгое представление о цели функционирования исследуемой системы и располагать информацией об ограничениях, которые определяют область допустимых значений управляемых переменных. Как цель, так и ограничения должны быть представлены в виде функций от управляемых переменных. Анализ модели должен привести к определению наилучшего управляющего воздействия на объект управления при выполнении всех установленных ограничений. При упрощённом описании реальных систем, на основе которого будет строиться та или иная модель, прежде всего следует идентифицировать доминирующие переменные, параметры и ограничения. Модель, будучи дальнейшим упрощением образа системы-оригинала, представляет собой наиболее существенные для описания системы соотношения в виде целевой функции и совокупности ограничений.
Наиболее важным типом моделей являются математические модели. В основе их построения лежит допущение о том, что все релевантные переменные, параметры и ограничения, а также целевая фукция количественно измеримы. Поэтому если
![]()
представляет собой ![]() управляемых переменных и условия функционирования исследуемой системы хаарктеризуются
управляемых переменных и условия функционирования исследуемой системы хаарктеризуются ![]() ограничениями, то математическая модель может быть записана в следующем виде:
ограничениями, то математическая модель может быть записана в следующем виде:
Найти оптимум
![]()
(целевая функция) при ограничениях
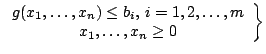
Ограничения ![]() – условия неотрицательности. Нахождение оптимума осуществляется для определения наилучшего значения целевой функции (максимума прибыли или минимума затрат, например). Полученное с помощью некоторой модели конкретное оптимальное решение является наилучшим только в рамках использования только этой модели. Не следует считать, что найденный оптимум – это действительно самое лучшее решение анализируемой задачи. Оно является наилучшим из всех возможных тогда, когда выбранный критерий оптимизации можно считать полностью адекватным конечным целям организации, в которой возникла исследуемая проблемная ситуация.
– условия неотрицательности. Нахождение оптимума осуществляется для определения наилучшего значения целевой функции (максимума прибыли или минимума затрат, например). Полученное с помощью некоторой модели конкретное оптимальное решение является наилучшим только в рамках использования только этой модели. Не следует считать, что найденный оптимум – это действительно самое лучшее решение анализируемой задачи. Оно является наилучшим из всех возможных тогда, когда выбранный критерий оптимизации можно считать полностью адекватным конечным целям организации, в которой возникла исследуемая проблемная ситуация.
2. Основные понятия теории оптимизации
2.1. Общая постановка задачи оптимизации
В общей задаче требуется найти вектор
![]()
из допустимой области ![]() , который обращает в минимум целевую функцию q(x), т.е. такой
, который обращает в минимум целевую функцию q(x), т.е. такой ![]() , для которого
, для которого
![]() (1)
(1)
Если ![]() существует, то он определяет слабый, глобальный (абсолютный) минимум q*(x) в допустимой
существует, то он определяет слабый, глобальный (абсолютный) минимум q*(x) в допустимой ![]() . Слабый, т.к. удовлетворяет нестрогому неравенству. Глобальный, т.к. неравенство справедливо для любых x из области X. Минимум при
. Слабый, т.к. удовлетворяет нестрогому неравенству. Глобальный, т.к. неравенство справедливо для любых x из области X. Минимум при ![]() сильный, если
сильный, если ![]() для
для![]() . Если поменять знаки неравенств – получим сильный и слабый максимумы. Минимум в точке
. Если поменять знаки неравенств – получим сильный и слабый максимумы. Минимум в точке ![]() называется локальным (относительным), если найдётся такая окрестность O(x*) точки
называется локальным (относительным), если найдётся такая окрестность O(x*) точки ![]() , что для всех
, что для всех ![]() имеет место
имеет место ![]() . Если
. Если ![]() дифференцируема, то задача отыскания локальных минимумов сводится к нахождению стационарных точек, в которых обращаются в ноль частные производные q(x):
дифференцируема, то задача отыскания локальных минимумов сводится к нахождению стационарных точек, в которых обращаются в ноль частные производные q(x):
![]() (2)
(2)
(2) – необходимое, но не достаточное условие. Достаточным условием существования в стационарной точке относительного минимума является положительная определённость квадратичной формы.
Похожие работы
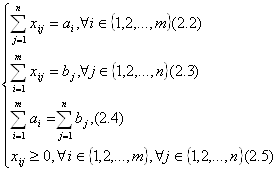
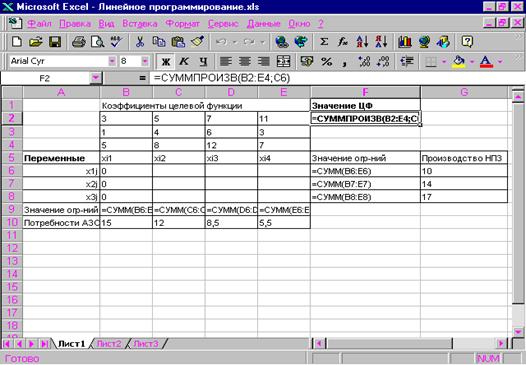
... . При этом значения cij соответствуют коэффициентам целевой функции исходной замкнутой транспортной задачи (1) и в последующем не изменяются. Элементы xij соответствуют значениям переменных промежуточных решений транспортной задачи линейного программирования и изменяются на каждой итерации алгоритма. Если в некоторой ячейке xij=0, то такая ячейка называется свободной, если же xij>0, то такая ...
... среди математиков, его разделяли А.Н.Колмогоров, И.М.Гельфанд, В.И.Арнольд, С.П.Новиков и др. Нельзя не восхищаться естественностью и внутренней стройностью математической работ Л.В. по двойственности линейного программирования и их экономической интерпретацией. 2. О математической экономике как области математики и о некоторых ее связях А) Связи линейного программирования с функциональным и ...
... решения останется неизменным, т.е. будет состоять из переменных (Х3,Х6,Х4,Х5). СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Смородинский С.С., Батин Н.В. Методы и алгоритмы для решения оптимизационных задач линейного программирования. Ч.1. – Мн.: БГУИР, 1995. 2. Смородинский С.С., Батин Н.В. Методы и алгоритмы для решения оптимизационных задач линейного ...
... области (если допустимая область ограничена и не пуста); 3. ограниченность целевой функции в допустимой области является необходимым и достаточным условием разрешимости задачи. Гл 2 Решение задач линейного программирования графическим способом на ЭВМ 2.1 Описание работы программы Программа написана с использованием собственных функций и процедур и трех стандартных модулей System, Crt и ...
0 комментариев