Министерство образования Республики Беларусь
Учреждение образования
"Гомельский государственный университет
им. Ф. Скорины"
Математический факультет
Кафедра дифференциальных уравнений
Показатели Ляпунова некоторой линейной стационарной системы
Курсовая работа
Исполнитель:
Студентка группы М-32
Лукьянович А.Ю.
Научный руководитель:
Канд. физ-мат. наук, доцент
Зверева Т.Е.
Гомель 2005
Содержание
Введение
1. Характеристические показатели Ляпунова
2. Теорема Ляпунова. Спектр системы
Заключение
Список использованной литературы
Введение
В данной курсовой работе рассматривается линейная стационарная система.
Линейной стационарной системой называется система вида
![]()
где ![]() − постоянная матрица,
− постоянная матрица,  .
.
Общее решение линейной стационарной системы имеет вид
![]()
где  - постоянный вектор,
- постоянный вектор,
![]() ) - фундаментальная матрица (иными словами, фундаментальная система решений, записанная в виде матрицы), то есть матрица, состоящая из n линейно независимых ее решений
) - фундаментальная матрица (иными словами, фундаментальная система решений, записанная в виде матрицы), то есть матрица, состоящая из n линейно независимых ее решений
Цель курсовой работы - найти спектр этой системы.
Множество всех собственных характеристических показателей решений дифференциальной системы называется ее спектром.
Таким образом, главная задача курсовой работы - найти различные характеристические показатели Ляпунова заданной линейной стационарной системы.
1. Характеристические показатели Ляпунова
Рассмотрим следующую линейную стационарную систему

(1).
Найдем общее решение этой системы. Для этого решим ее методом исключения.
Продифференцировав первое уравнение системы (1) и пользуясь вторым, получим
![]()
Или
![]() (2).
(2).
Решим полученное линейное уравнение с постоянными коэффициентами (2). Для этого составим характеристическое уравнение и найдем его корни:
λ![]() λ=0
λ=0
λ![]() =i
=i
λ![]() =-i
=-i
Так как характеристическое уравнение имеет два сопряженных корня λ![]() =i и λ
=i и λ![]() =-i, то общее решение линейного уравнения (2) имеет вид
=-i, то общее решение линейного уравнения (2) имеет вид
y=c![]() cos t +c
cos t +c![]() sin t.
sin t.
Подставим значение y в первое уравнение системы (1), получим
z=-c![]() sin t +c
sin t +c![]() cos t.
cos t.
Тогда общее решение системы (1) имеет вид
 .
.
Составим фундаментальную систему решений системы (1).
Определение1 [2,c.482]. Фундаментальной системой решений в интервале (a,b) называется совокупность n решений однородной системы, определенных и линейно независимых в этом интервале.
Положим c![]() =1,c
=1,c![]() =0. Подставим значения c
=0. Подставим значения c![]() и c
и c![]() в общее решение системы. Получим
в общее решение системы. Получим
 .
.
Пусть теперь c![]() =0,c
=0,c![]() =1. Тогда получим
=1. Тогда получим
 .
.
Эти решения системы (1) запишем в виде матрицы
![]() .
.
Покажем, что найденные решения составляют фундаментальную систему решений.
Для этого воспользуемся следующей теоремой.
Теорема 1 [2, c.480]. Если n решений линейной однородной системы линейно независимы в интервале (a,b), то их вронскиан не обращается в нуль ни в одной точке этого интервала. Составим и вычислим вронскиан решений системы (1):
 ≠ 0.
≠ 0.
Итак, вронскиан решений системы (1) не обращается в нуль ни в одной точке интервала (−∞; + ∞), значит, найденные решения системы (1) являются линейно независимыми в интервале (−∞; + ∞) (по теореме1) и составляют фундаментальную систему решений (по определению1).
Вычислим характеристические показатели матриц x![]() и x
и x![]() . Приведем определение характеристического показателя.
. Приведем определение характеристического показателя.
Определение2 [1,c.125]. Число (или символ −∞ или + ∞), определяемое формулой
![]()
называется характеристическим показателем Ляпунова.
Лемма [1, c.132]. Характеристический показатель конечномерной матрицы F (t) совпадает с характеристическим показателем ее нормы.
Согласно леммы и определения1 характеристические показатели матриц X![]() и X
и X![]() будем вычислять по следующей формуле
будем вычислять по следующей формуле
 (3).
(3).
Вычислим нормы матриц x![]() и x
и x![]() .
.
Определение3 [1,c. 20]. Нормой матрицы А= [a![]() ] называется неотрицательное число
] называется неотрицательное число![]() , удовлетворяющее следующим условиям:
, удовлетворяющее следующим условиям:
1) ![]() и обратно, если
и обратно, если ![]() то A=0;
то A=0;
2) ![]() где
где ![]() любое комплексное число;
любое комплексное число;
3) ![]() где A,B-любые матрицы, допускающие сложение;
где A,B-любые матрицы, допускающие сложение;
4) ![]() где A,B-любые матрицы, допускающие умножение;
где A,B-любые матрицы, допускающие умножение;
Норма имеет следующие значения:
![]()
![]()
Для вектор-столбца

эти нормы имеют соответственно, следующие значения:
![]()
![]()
 (4).
(4).
При вычислении норм матриц x![]() и x
и x![]() воспользуемся формулой (4).
воспользуемся формулой (4).
![]()
![]()
Тогда по формуле (3) имеем
λ![]()
![]()
![]() =
= ![]()
![]()
![]() =
=![]() .
.
λ![]()
![]()
![]() =
= ![]()
![]()
![]() =
=![]() .
.
Выясним, является ли фундаментальная система решений линейной стационарной системы (1) нормальной фундаментальной системой. Для этого воспользуемся следующей теоремой и определением4.
Теорема Ляпунова (о нормальности фундаментальной системы) [1,c.142]. Фундаментальная система линейной системы является нормальной тогда и только тогда, когда она обладает свойством несжимаемости.
Определение4 [1,c.142]. Система ненулевых векторов функций ![]() обладает свойством несжимаемости, если характеристический показатель любой существенной их комбинации
обладает свойством несжимаемости, если характеристический показатель любой существенной их комбинации
![]()
где![]() − постоянны, совпадает с наибольшим из характеристических показателей комбинируемых решений, то есть имеем
− постоянны, совпадает с наибольшим из характеристических показателей комбинируемых решений, то есть имеем
![]()
Возьмем произвольную линейную комбинацию векторов
x![]() и x
и x![]() .
.
Y=![]() где
где ![]() −постоянны и
−постоянны и ![]() (5).
(5).
Произведем арифметические действия над векторами x![]() и x
и x![]() . Тогда равенство (5) примет вид
. Тогда равенство (5) примет вид
 (6).
(6).
Вычислим характеристический показатель линейной комбинации векторов (6).
![]()
![]()
![]()
Тогда по формуле (3) имеем
![]()
Итак, характеристический показатель линейной комбинации векторов совпадает с наибольшим из характеристических показателей комбинируемых решений x![]() и x
и x![]() , значит, система векторов x
, значит, система векторов x![]() и x
и x![]() обладает свойством несжимаемости (по определению4) Следовательно, фундаментальная система решений линейной стационарной системы (1) является нормальной фундаментальной системой (по теореме Ляпунова).
обладает свойством несжимаемости (по определению4) Следовательно, фундаментальная система решений линейной стационарной системы (1) является нормальной фундаментальной системой (по теореме Ляпунова).
Найдем спектр системы (1).
Воспользуемся определением и следствием из теоремы Ляпунова.
Определение5 [1,c.137]. Спектром называется множество всех собственных характеристических показателей (то есть отличных от −∞ и +∞) решений дифференциальной системы.
Следствие [1,c.145]. Всякая нормальная фундаментальная система реализует весь спектр линейной системы.
Согласно определения5 и следствия из теоремы Ляпунова спектр стационарной системы (1) равен![]()
![]()
Заключение
Таким образом, в процессе исследования линейной стационарной системы мы выяснили, что ее фундаментальная система решений является нормальной фундаментальной системой; нормальная фундаментальная система решений реализует весь спектр дифференциальной системы; спектр рассмотренной линейной стационарной системы равен![]() .
.
Список использованной литературы
1. Б.П. Демидович "Лекции по математической теории устойчивости"-М.: Наука, 1967г., 465 c.
2. Н.М. Матвеев "Методы интегрирования обыкновенных дифференциальных уравнений"-М.: Высшая школа, 1967г., 564 с.
Похожие работы


... . В результате, на выходе реле сигнал будет непрерывным, но ступенчатым 3.2.2.3 Релейно-импульсные системы В них происходит квантование сигналов по времени и по уровню. К этому типу относятся цифровые системы управления, в частности АСУТП с используемым ВК. При большом количестве разрядов АЦП и ЦАП квантованием можно пренебречь, и отнести такие системы к импульсным. 3.2.2.4 Системы на ...
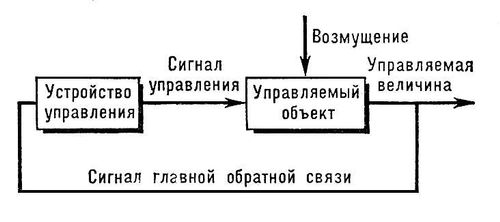
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... . Алгоритм управления показывает, как должно изменяться управление u, чтобы обеспечить заданный алгоритм функционирования. Алгоритм функционирования в автоматической системе реализуется с помощью управляющих устройств. В основе используемых в техники алгоритмов управления лежат некоторые общие фундаментальные принципы управления, определяющие, как осуществляется увязка алгоритма управления с ...
... мероприятия по обеспечению однородности выпускаемой продукции. Все эти мероприятия можно объединить в четыре группы: 1. совершенствование технологии производства; 2. автоматизация производства; 3. технологические (тренировочные) прогоны; 4. статистическое регулирование качества продукции. 2.10. Проектирование технологических процессов с использованием средств ...
0 комментариев