Навигация
Коррекция систем автоматического управления
10050
знаков
5
таблиц
16
изображений
Контрольная работа
Предмет: Теория автоматического управления
Тема: "Коррекция систем автоматического управления"
1. Коррекция: общие положения
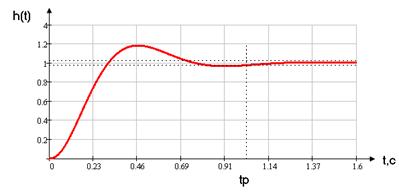
Любая система должна быть устойчивой и удовлетворять требованиям по точности и качеству переходного процесса.
Существует два пути достижения этих целей:
1. Изменение варьируемых параметров системы (параметры регулятора), но требования по качеству и устойчивости часто являются противоречивыми, например, увеличение коэффициента усиления системы повышает точность системы, но при этом система может стать неустойчивой.
2. Изменение структуры системы, путем введения дополнительных устройств, называемых корректирующими.
При коррекции систем управления решается задача синтеза корректирующего устройства, которая заключается в определении структуры и параметров корректирующего устройства, включение которого делает систему удовлетворяющей поставленным к ней требованиям.
2. Корректирующие устройства
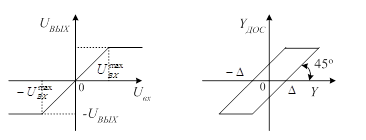
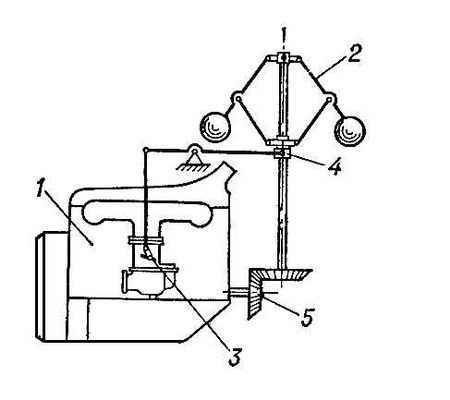
Корректирующие устройства чаще всего представляют собой пассивные четырехполюсники, состоящие из RC – элементов. Эффективность корректирующих устройств определяется правильным выбором их параметров (ki , Ti). Если сигналы электрические используются RC – цепи, если не электрические, то используются их механические аналоги (рис. 1а).
Корректирующие устройства можно классифицировать:
1. По видам: последовательные и параллельные.
2. По типам: дифференцирующие, интегрирующие и интегро-диффе-ренцирующие.
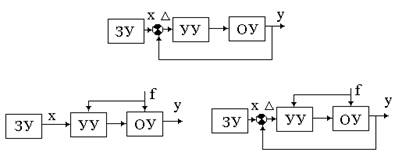
Последовательная коррекция. При последовательной коррекции корректирующее устройство включается последовательно в контур управления (рис. 1б).
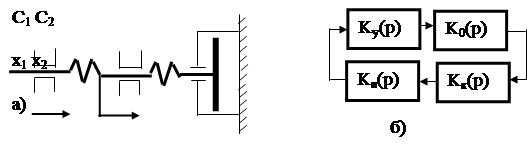
Рис. 1
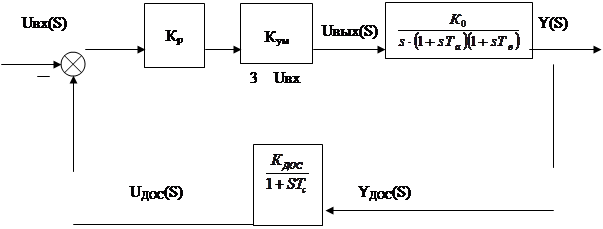
При этом передаточная функция разомкнутой системы, независимо от места включения корректирующего устройства равна
![]()
Так как корректирующее устройство чаще всего представляет собой пассивный RC –фильтр, то ставить его в цепь, где передаются большие мощности, не рационально с точки зрения энергетических затрат, так как при этом необходимы дорогостоящие корректирующие устройства (большие потери мощности).
Так как ОУ - мощное устройство, УУ - менее мощное устройство, ИУ - маломощное устройство, то обычно корректирующие устройства включаются на входе системы либо выходе измерительного устройства.
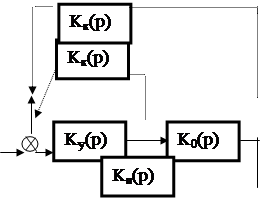
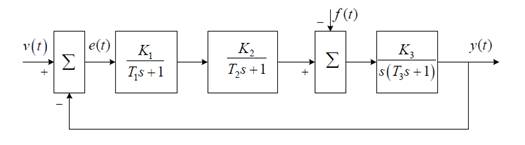
Параллельная коррекция. При параллельной коррекции, корректирующее устройство может быть включено параллельно любому звену или соединению звеньев (рис. 2а).
При этом передаточная функция скорректированной системы зависит от места включения корректирующего устройства. Синтез параллельных корректирующих устройств сложнее, чем последовательных.
Рассмотрим различные типы корректирующих устройств и их характеристики.
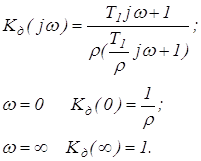
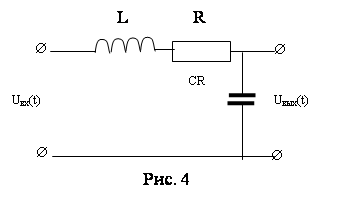
Дифференцирующее корректирующее устройство. Схема дифференцирующего корректирующего устройства приведена на рис. 2б.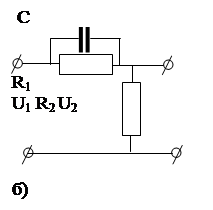 | |||
 | |||
|

k -коэффициент ослабления контура.
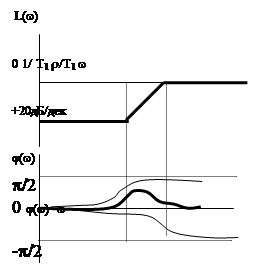
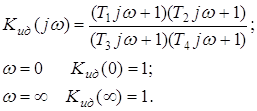
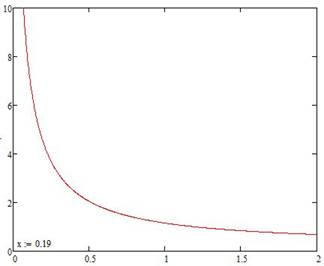
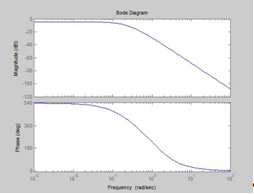
Частотные характеристики дифференцирующей цепи, приведены в таблице 1.Таблица 1
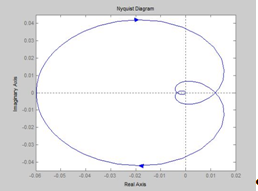
| АФХ | Логарифмические характеристики | ||
    |
|
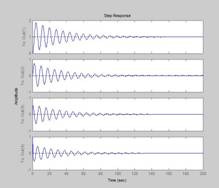
Работа дифференцирующего корректирующего устройства. Введение дифференцирующего корректирующего устройства уменьшает коэффициент усиления на низких частотах, что уменьшает точность системы, но увеличивает запас устойчивости.
За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы, но расширение полосы пропускания увеличивает действие помех.
Интегрирующее корректирующее устройство. Схема интегрирующего
корректирующего устройства приведена на рис. 3а.
На схеме рис. 5 приняты следующие обозначения
| АФХ | Логарифмические характеристики |
|
|
|
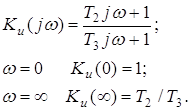
Работа дифференцирующего корректирующего устройства. Введение интегрирующего корректирующего устройства уменьшает коэффициент усиления на высоких частотах, что уменьшает действие помех, но ухудшает переходный процесс.
Интегро-дифференцирующее корректирующее устройство. Схема интегро-дифференцирующего корректирующего устройства приведена на рис. 3б
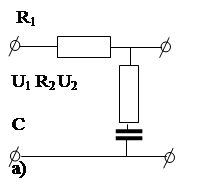 | 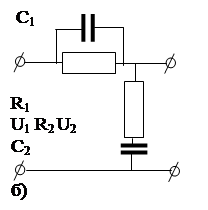 | ||
Рис. 3
Для интегро-дифференцирующего контура, обычно С2 > С1. В области низких частот С1можно пренебречь, и контур работает как интегрирующий, а в области высоких частот С2можно пренебречь, и контур работает как дифференцирующий.
(В ТАУ НЧ 0 £ w £ 5 с-1; СЧ 5 £ w £ 50 с-1; ВЧ 50 £ w £ ¥ с-1).
Передаточная функция цепи, представленной на рис. 3б имеет вид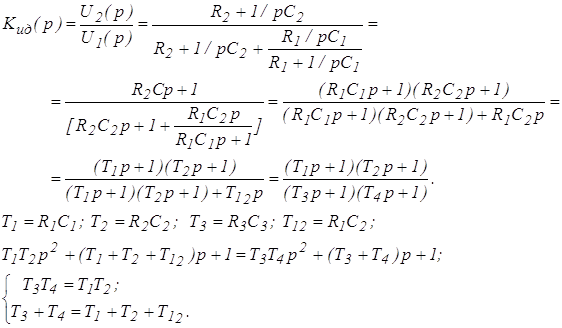
Частотные характеристики цепи, приведены в таблице 3.
Таблица 3
| АФХ | Логарифмические характеристики | ||
    |
|
Интегро-дифференцирующее корректирующее устройство в области низких частот работает как интегрирующее, а в области высоких частот как дифференцирующее, поэтому оно совмещает достоинства интегрирующего и дифференцирующего устройств.
За счет уменьшения коэффициента усиления на низких частотах увеличивается запас устойчивости.
За счет положительного фазового сдвига, вносимого контуром, увеличивается частота среза, а значит, уменьшается время регулирования, т. е. повышается быстродействие системы.
Похожие работы
... записи в Zam_ck=inv(l+sysl)*sysl можно в диалоговом режиме произвести новую запись zpk(.) - сокращая одинаковые элементы числителя и знаменателя в Zam_ck. 2.Исследование линейной импульсной системы автоматического управления Задание: 1) Найти передаточные функции импульсной САУ: W*(z) разомкнутой системы, Ф*(z) – замкнутой системы, Фе*(z) – системы по ошибке. Параметры Т, Т1, τ1, К0, ...


... устройства, которое нужно добавить к некоторой неизменяемой части системы, чтобы обеспечит требуемое качество системы в установившемся и переходном режимах. Наиболее приемлемым для решения задачи динамического синтеза является метод логарифмических амплитудных характеристик (метод ЛАХ). [1, § 12.5] Стадии синтеза по методу ЛАХ включают: 1. построение располагаемой ЛАХ, т.е. ЛАХ исходной ...


... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
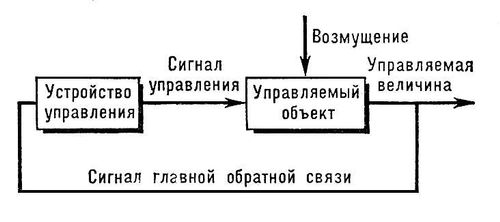
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
0 комментариев